Егэ-тренер для учителей и репетиторов Пожалуйста, переходите на актуальный сайт egetrener.me! |
|
Живая геометрия, лекция 10 Дата: 2013-09-17 19:30:00 И вот мы подошли к построению настоящей модели параллелепипеда, которой мы сможем дистанционно управлять - менять все три измерения, наклонять и даже поворачивать. |
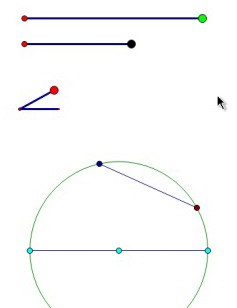 Для начала строим обыкновенный прямоугольник, вписанный в окружность, но безусловно подчиняющийся нашим движкам.
Для начала строим обыкновенный прямоугольник, вписанный в окружность, но безусловно подчиняющийся нашим движкам.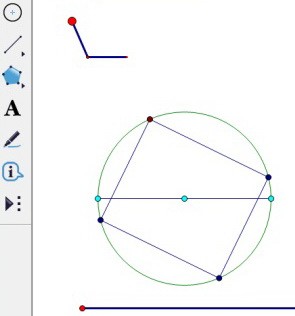 Затем применяем к нему волшебную гомотетию и получаем параллелограмм, вписанный в эллипс.
Затем применяем к нему волшебную гомотетию и получаем параллелограмм, вписанный в эллипс.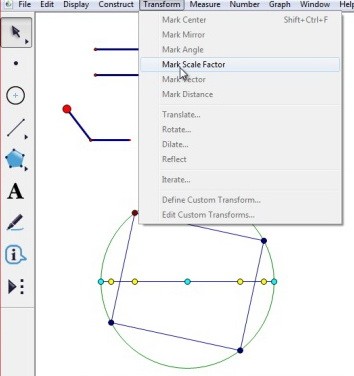 Строим верхнее и нижнее основания, проводим боковые рёбра. Проверяем работу нашей модели.
Строим верхнее и нижнее основания, проводим боковые рёбра. Проверяем работу нашей модели.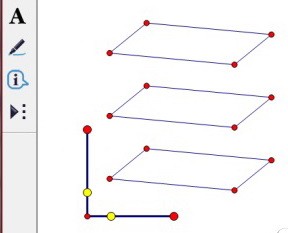 Параллелепипед оживает и замечательно выполняет команды из пульта управления.
Параллелепипед оживает и замечательно выполняет команды из пульта управления. Осталось позаботиться о том, чтобы невидимые рёбра многогранника оказались бы пунктирными. Это не такая лёгкая задача, как кажется на первый взгляд...
Осталось позаботиться о том, чтобы невидимые рёбра многогранника оказались бы пунктирными. Это не такая лёгкая задача, как кажется на первый взгляд...